Дорогие мои читатели, начинаем разбирать темы августовского стола заказов (боже мой, как быстро летит время!). Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов.
Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать.
Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую.
В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Электродвигатель. Основные понятия на простом языке
Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря.
Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину.
В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам:
- расширение применения электродвигателей находится в прямой зависимости от удешевления электрической энергии, т. е. от создания генератора, более экономичного, чем гальванические элементы;
- электродвигатели должны иметь по возможности малые габариты, большую мощность ибольший коэффициент полезного действия;
- этап в развитии электродвигателей связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом.
Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока.
Электродвигатель постоянного тока. Принцип работы.
В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался.
В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями.
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения.
Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий.
Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах — специальная обмотка, служащая для улучшения условий коммутации.

Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор.
Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях).
Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины.
Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса.
Рис. 2. Упрощенное изображения коллектора
Рис. 3. Выпрямление переменного тока с помощью коллектора
Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось.
В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет.
В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора.
Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов.
При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь».
Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями.
Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора.
То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно.
Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.

Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Принцип работы:
Сборка двигателя постоянного тока ПО ДЕТАЛЯМ:
Источник: masterok.livejournal.com
Что такое электродвигатель переменного тока
Двигатель переменного тока — электродвигатель, питание которого осуществляется переменным током.
В основе работы электродвигателей лежит процесс электромагнитной индукции, которая возникает при движении проводящей среды в магнитном поле. В качестве проводящей среды обычно используется обмотка, состоящая из достаточно большого количества проводников, соединенных между собой надлежащим способом.
Магнитное поле в электродвигателе создается либо с помощью постоянных магнитов, либо возбуждающими обмотками, которые обтекаются токами. Электродвигатели обратимы, то есть могут работать по преобразованию электрической энергии в механическую и, наоборот, в режиме генератора. В корпусе электродвигателя находится неподвижный полый цилиндрический статор, набранный из отдельных, изолированных друг от друга пластин электротехнической (магнитной) стали. На внутренней стороне статора в пазах расположены витки обмотки возбуждения из медной проволоки.
Внутри статора располагается подвижный, вращающийся на валу ротор, состоящий тоже из стальных пластин, также изолированных друг от друга термостойким лаком. В пазах ротора располагаются витки медной обмотки. Обмотка статора подсоединяется к источнику переменного тока. Электродвигатели переменного тока делятся на синхронные и асинхронные, в зависимости от того, в каком отношении находится скорость вращения к частоте. При изготовлении и выборе электродвигателей большое значение имеют условия их эксплуатации и климатические условия, в зависимости от которых используются разные виды электродвигателей, имеющие конструкционные особенности, делающие их пригодными для эксплуатации в различных условиях.
При выборе электродвигателя необходимо учитывать коэффициент их полезного действия и потери электроэнергии в проводниках, питающих электродвигатель. Синхронные электродвигатели используются в качестве двигателей в крупных установках, таких, как привод поршневых компрессоров, воздуховодов, гидравлических насосов и т.д. Асинхронные двигатели также применяются в промышленности, например,
для приводов крановых установок общепромышленного назначения, а также различных грузовых лебедок и других устройств, необходимых в производстве. Электродвигатели переменного тока имеют огромное значение для большинства видов промышленности.
- ru.wikipedia.org — об электродвигателе переменного тока;
- bestreferat.ru — электродвигатели переменного тока общего назначения;
- revolution.albest.ru — электродвигатели постоянного и переменного тока.
Источник: mamqa.com
Новые технологические разработки электродвигателей
В настоящее время перед разработчиками электродвигателей стоит задача оптимизации крутящего момента двигателя/генератора, эффективности, размеров веса и других эксплуатационных параметров. На практике условия конкретных приложений диктуют, какие именно характеристики электродвигателей должны быть оптимизированы.
Режимы работы практически всех двигателей могут быть разделены на три группы: с постоянной скоростью, с переменной скоростью или в режиме старт-стоп. Растущие требования к эффективности по мощности ведут к применению электронных приводов, обеспечивающих переменную скорость вращения двигателей, что позволяет увеличивать эффективность в более широком диапазоне по сравнению с режимами с постоянной скоростью.
При разработке систем перемещения, где необходима высокая точность позиционирования, требуются, как правило, двигатели с высокими пиковыми значениями крутящих моментов, равномерной скоростью и плавным снижением момента при остановке. Силовые и управляющие электронные устройства обеспечивают контроль за перемещением и всей мехатронной системой, состоящей из двигателя, его привода и управляющих элементов.
Существует пять основных типов электродвигателей: универсальный щеточный электродвигатель постоянного тока, индукционный электродвигатель переменного тока, бесщеточный синхронный электродвигатель с электронным управлением, синхронный электродвигатель с постоянным магнитом (PM) и, наконец, — универсальный электродвигатель с двумя обмотками, который может управляться как постоянным, так и переменным входными напряжениями. Недостатком последнего электродвигателя является низкая эффективность по мощности. Щеточные электродвигатели постоянного тока с двумя обмотками и постоянным магнитом имеют ограниченный срок службы из-за механической коммутационной системы.
В новых технологических разработках используются в основном индукционные электродвигатели, двигатели с переменным или переключаемым магнитным сопротивлением и бесщеточные синхронные электродвигатели с постоянным магнитом. Иногда появляются разработки, в которых скомбинированы эти три технологии.
Двигатель с постоянным магнитом
Электродвигатели с постоянным магнитом характеризуются самой высокой эффективностью по мощности и являются лидерами среди широкого круга современных двигателей. Бесщеточные синхронные электродвигатели с постоянным магнитом (PMSM) имеют несколько названий: бесщеточный электродигатель постоянного тока, бесщеточный PMAC-электродвигатель, а также электродвигатель с электронным управлением (ECM).
В настоящее время в PMSM, используемых в широком диапазоне приложений, магниты располагаются на цилиндрической поверхности ротора. Последние тенденции развития сервосистем позиционирования заключаются в создании IPM-конфигураций с внутренними и скрытыми в цилиндрических перекладинах постоянными магнитами. Такие конфигурации позволяют увеличивать крутящий момент или снижать размеры и вес различных прецизионных систем позиционирования. Сервоприводы данного типа находят применение в станках, роботах и различных полупроводниковых устройствах.
Электродвигатели с аксиальным магнитным потоком
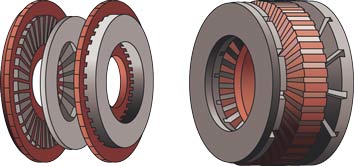
Транспортная индустрия (мопеды, скутеры, мотоциклы и автомобили) являются целевой аудиторией PMSM-технологии. Два замечательных примера систем с новым расположением магнитов — это PMSM с аксиальным и поперечным потоками.
Показанный на рисунке 1 PMSM с аксиальным потоком имеет уникальную дисковую форму, позволяющую получить больший крутящий момент, чем традиционные PMSM цилиндрической формы с радиальным потоком. Такая уникальная конфигурация позволяет разместить электродвигатель в центре рулевого колеса практически любого транспортного средства. Электродвигатели с аксиальным потоком обеспечивают большой крутящий момент и низкую осевую скорость, что во многих приложениях устраняет необходимость применения дорогостоящих редукторов. Возрождающийся интерес к гибридным или электрическим транспортным средствам благоприятствует стремлению разработчиков применять электродвигатели с аксиальным потоком.
Существуют две основных конфигурации для создания аксиального потока: внутренний PM-ротор между двумя обмотками статора и тор с двумя роторами вокруг неподвижного статора. Конфигурация с внутренним PM-ротором является наиболее популярной.
Транспортные компании поддерживают исследования, проводимые в университетах по всему миру, направленные на оценку, разработку и использование электродвигателей этого типа. Китайские компании выпускают большое количество электродвигателей с аксиальным потоком для мопедов.
Правда, многие молодые компании не смогли пережить недавний кризис, но тем не менее, KLD Energy Technologies, Austin, TX, предлагают производителям скутеров 5-кВт модель такого типа. Компании YASA Motors, Abington, UK разработали электродвигатели с аксиальным потоком для более крупных транспортных средств с беспазовым (slotless) статором. Эти электродвигатели производят более 60 Нм при 3600 об/мин (25 кВт) и имеют пиковую эффективность по мощности 96%. Практически все двигатели с аксиальным потоком используют сверхмощные постоянные магниты из неодим-ферробора.
Более уникальную конфигурацию PMSM с аксиальным потоком предлагает компания NovaTorque. Осевая длина ее PMSM больше радиального диаметра. Ротор двигателя NovaTorque содержит конические втулки, состоящие из ферритовых магнитов, встроенных в IPM-конфигурации в магнитно-мягкий материал.
Такая конфигурация вкупе с недорогими ферритовыми магнитами позволяет достичь характеристик, превышающих аналогичные параметры, получаемые при использовании магнитов из редкоземельных материалов (ниодима). Втулки размещаются на каждом конце ротора, поэтому магнитный поток протекает прямо (параллельно оси) через аксиально ориентированные полюса статора. Поверхности конических втулок ротора формируют большую площадь воздушного зазора, что позволяет улучшить крутящий момент.
Первый электродвигатель такого типа — PremiumPlus+ компании Nova-Torque — PMSM-электродвигатель с аксиальным потоком мощностью 3 л.с.— развивает 18 Нм при 1800 об/мин. NovaTorque фокусирует свое внимание на вентиляторах, насосах и компрессорах, используемых в системах нагрева, вентиляции, кондиционирования и охлаждения (HVACR).
Двигатели с поперечным потоком
Двигатели с поперечным потоком (см. рис. 2) имеют сложную магнитную схему. Если для двигателей с радиальным и аксиальным потоками можно построить двумерную модель либо методом анализа конечного элемента (FEA), либо другими прямыми математическими методами, то для электродвигателей с поперечным потоком требуется трехмерное (3D) моделирование методом FEA, поскольку трехмерными являются их магнитные схемы.

Рис. 2. Двигатели с поперечным потоком
В таких двигателях U-образные магнитные элементы расположены вокруг обмотки статора кольцевой формы. Электродвигатели с поперечным потоком были изобретены еще в 1896 г., но разработка приложений, где востребованы их улучшенные характеристики, задерживалась из-за сложной структуры и высокой стоимости. Появление магнитов из ниодима и мягких магнитных композитных материалов позволило швейцарской компании Landert Motoren разработать небольшие электродвигатели с поперечным потоком серии MDD1 с номинальным крутящим моментом 3,3…10 Нм при 300 об/мин (100…300 Вт). Такие двигатели могут быть использованы во вращающихся столах и других промышленных приложениях.
Компания Electric ResearchInstitute (Южная Корея) выпускает электродвигатели с поперечным потоком уже более 10 лет. Причем в этой компании разработаны версии как для линейного, так и для вращательного движения. Эти транспортные системы способны достигать 1120 фунт-сила (5000 Н). Электродвигатели с поперечным потоком могут развивать очень высокий крутящий момент и плотность мощности, но отличаются довольно высокой стоимостью. В настоящее время их применение ограничено специальными приложениями.
Гибридные цилиндрические электродвигатели
Цилиндрические электродвигатели с радиальным потоком — это тоже перспективное направление разработок. Здесь используются сразу две технологии двигателей: двигатели с постоянным магнитом (PM) и переменным магнитным сопротивлением (VR) и индукционные двигатели переменного тока с постоянным магнитом (PM). Лучший пример такого объединения продемонстрировала компания QM Power.
Новая технология QM Power — ParallelPath Magnetic Technology (PPMT) — объединяет VR- и PM-технологии. Два магнитных потока протекают по одним и тем же магнитным элементам электродвигателя: один поток формируется двумя PM, а другой — VR-обмоткой ротора-статора. Магнитная сила может быть увеличена в три раза, что приводит к росту плотности мощности на 30% и аналогичному возрастанию пиковой эффективности, как утверждает QM Power. Диапазон мощности составляет от 100 Вт до сотен кВт.
PPMT предназначены для работы в приложениях как с постоянной, так и с переменной скоростью вращения, включая тяговые приводы. PPMT характеризуются высокой эффективностью по мощности при высоких нагрузках. Они демонстрируют очень хорошие характеристики при использовании ферритовых магнитов.
Другой пример гибридных двигателей — линейный индукционный двигатель переменного тока, объединяющий короткозамкнутый ротор и PM-магнит (обычно ферритовый), что позволяет значительно улучшить эффективность электродвигателя. Компания Lafert Corp. (Италия) выпускает семейство промышленных и коммерческих линейных PPMT-двигателей переменного тока мощностью 1…15 кВт с увеличенной пиковой эффективностью на 5–8%.
Источник: elektrovar21.ru