Ведущий канала “Учебник Мастерства” показал наглядно, как сделать шагающего мини робота. В первую очередь сделаем лапы. Две палочки от мороженого скрепляет вместе, отмеряем 6 сантиметров и сразу ставим две метки, где будут отверстия. Скальпелем удаляем всё лишнее, а место среза обрабатываем наждачкой. Бормашинкой по меткам сверлим два отверстия.
Берем еще две палочки, закрепляем скотчем, отмеряем 6 сантиметров и отрезаем ножовкой.Край закруглить не надо. На эту заготовку делаем отверстие только с одной стороны. Эти заготовки будем клеить прямо посередине полки с закругленными краями. Обратите внимание, они должны быть перпендикулярными. Заранее готовим четыре кусочка деревянные шпажки по 3 сантиметра.
Вставляем в нижнее отверстие. При помощи суперклея к шпажке приклеиваем две заготовки по 8 см. Используйте линейку, чтобы соблюдать угол 90 градусов. Посмотрите, что должно получиться. Точно таким же образом делаем вторую лапу.
Как видите, все понятно и в домашней обстановке несложно все это делать.
Крутые РОБОТЫ созданные в домашних условиях

Нам еще понадобится пластиковый шарик из под игрушки. В нижней части шара с помощью ножовки делаем два углубления для деревянной шпажки. Закручиваем верхнюю участие маркером отмечаем где будет начала разреза. По резьбе раскручиваем и ещё раз отмечаем. Аккуратно между метками ножовкой делаем надрезы.
Выбираем всё. Когда будем откручивать или закручивать шарик, отверстие всегда будет открытым.
Берем малооборотистый моторчик редуктор. Присоединяем к нему готовый контакт. Можно обойтись обыкновенными проводками. От чупа-чупса отрезаем кусочек ножки. Один конец хорошо нагреваем и сплющиваем. Второй конец тоже греем и одеваем на вал редуктора.
В нижней части пластикового шарика отмеряем и клеем кусок палочки из под мороженого. Это будет подставка под мотор редуктор. Даем суперклея чуть-чуть затвердеть и сверху обильно наносим горячий клей. Ставим мотор и корпуса заливаем горячим клеем. Он не должен попадать на редуктор. Оставляем шар с мотором в стороне.
Делаем 2 сантиметровые заготовки с отверстием посередине. Чтобы не было заусенцев, край обрабатываем наждачной бумагой. Берем линейку и делаем две отметки на расстоянии 1 см. По меткам сверлим два отверстия, скальпелем срезаем полукругом. Края обрабатываем.
Продолжение на видео с пятой минуты. Здесь детально показано, как в домашних условиях сделать интересного мини робота.
Простейший робот в домашних условиях
Для изготовления простейшего нам понадобится моторчик, два куска провода, прищепка, зарядное устройство от телефона. Сначала нужно присоединить проволоку к двигателю. После этого, как клей затвердел, возьмём плоскогубцы согнем ножки. Теперь можно раздвинуть их, чтобы робот стоял более уверенно. Теперь припаяем контакты на зарядное устройство к плюсу и минусу.
Далее видео канала “Без Чувств”, где показано, как создать эту игрушку робота.
Как сделать простого робота в домашних условиях, даже без батарейки
Теперь можно тестировать этого простейшего мини робота. Чтобы он зашевелился, нацепим прищепку на ротор. Вот и всё! Робот бегает.
Мини робот из набора в домашних условиях
На канале Alphadroid рассказали, как сделать в домашних обстоятельствах мини робота.
Для сборки ходячего необходимо большое количество компонентов. Была использована платформа для самостоятельной сборки «Дройдик». Помимо деталей, которые можно приобрести на радио-рынке, в наборе есть дополнительные необходимые элементы.
Смотрите видео канала Alpha Mods.
Комплектация набора: панели с деталями для сборки корпуса, батарейный отсек, 4 полноценных набора сервоприводов, 30 гаек, винты и гайки М 3, 2 самореза, ультразвуковой датчик расстояния, шлейф, намагниченная отвертка, инструкция по сборке.
Корпус робота деревянный, из МДФ. В комплекте 5 пластин с деталями для корпуса, обработанные лазерным гравером. Робот оснащен ультразвуковым датчиком, это поможет ему ориентироваться в пространстве. На первых страницах инструкции нарисованы панели корпуса в масштабе 1:1. Необходимо взять реальные пластины и пронумеровать так, как это сделано на рисунке.
Первым делом необходимо взять деталь D1 и D4, а также пару винтов М3*10. Аккуратно вынимаем детали из пластины и прикручиваем друг к другу. Берем D5 и сервоприводы. Прикручиваем к D5 с помощью саморезов, которые идут в комплекте. Берем первую и вторую заготовки, соединяем с помощью D3.
В деревянных деталях есть пазы, и они друг в друга вставляются. Берем гайки и располагаем в отведенные для них места. Это были ноги и ступни робота. Переходим к D2 и рукава для сервоприводов. Рукав фиксируем на планке.
Планка надевается.
Проводим калибровку: проворачиваем привод в сторону, вытаскиваем планку, вставляем заново и проворачиваем снова, пока планка не упрется. Еще раз снимаем планки и надеваем в конечное положение: так чтобы D2 касалось D3, либо была максимально близка к ней. Возвращаем привода на исходное положение. На этапе калибровка завершена. Берем опору D10 и устанавливаем ее на D1 и D2.
D1 зажимается с помощью контргайки не до упора. То, что сейчас установили является гнездом для сервоприводов, оставшиеся два помещаем на соответствующие гнезда. Есть планка фиксации – D11.
Калибровка: одеваем плечики и проворачиваем до упора, плечи снимаем и устанавливаем в вертикальном положении, задаем угол в 90 градусов, наконец снимаем. Ноги готовы. Для сборки головы: D7, D14 и 4 болта м3*12 мм.
Как создать робота?


Когда речь заходит о роботах, мы представляем себе гигантскую машину с искусственным интеллектом, как в фильмах про Робокопа и т. д. Однако робот не обязательно должен быть большим и технически сложно сделанным устройством. В этой статье мы расскажем, как создать робота в домашних условиях. Сотворив собственного мини-робота, вы убедитесь, что никаких специальных знаний и инструментов для этого не потребуется.
Материалы для работы
Итак, создаем робота своими руками, подготовив следующие материалы для конструирования:
- 2 небольших куска проволоки.
- 1 маленький игрушечный двигатель на 3 Вольта.
- 1 батарейка АА.
- 2 бусины.
- 2 небольших квадратных куска пенополистирола разного размера.
- Клеевой пистолет.
- Материал для ножек (скрепки, головка зубной щетки и т. д.).
Инструкция по созданию робота
Теперь перейдем к поэтапному описанию, как создать робота:
- Приклейте больший кусок пенополистирола к игрушечному двигателю к стороне с металлическими контактами сверху. Это необходимо, чтобы защитить контакты от попадания влаги.
- Сверху куска пенополистирола приклейте батарейку.
- Второй кусок пенополистирола приклейте сзади двигателя, чтобы создать небольшой весовой дисбаланс. Именно благодаря этому дисбалансу робот получит возможность перемещаться. Дайте клею высохнуть.
- Приклейте ножки к двигателю. Чтобы ножки держались максимально прочно, к двигателю сначала необходимо будет приклеить небольшие куски пенополистирола, а уже к ним затем приклеить ножки.
- Проволоку к двигателю можно либо примотать изолентой, либо припаять. Второй вариант более предпочтителен — так робот прослужит значительно дольше. Оба куска проволоки необходимо припаять к металлическим контактам на двигателе максимально крепко.
- Далее вам необходимо будет присоединить любой из кусков проволоки к одной из сторон батарейки, к «плюсу» или к «минусу». Ее можно прикрепить к батарейке либо при помощи изоленты, либо при помощи клеевого пистолета. Крепление при помощи клея более надежно, но при его нанесении необходимо быть максимально осторожным, так как если вы используете слишком много клея, контакт между проволокой и батарейкой будет потерян.
- Приклейте бусины к батарейке для имитации глаз.
- Подсоедините второй кусок проволоки к другому концу батарейки, чтобы привести робота в движение. В данном случае лучше использовать не клей, а изоленту. Так вы легко сможете разомкнуть контакт и остановить робота, когда он вам надоест.
Такой робот прослужит ровно столько, на сколько хватит заряда батарейки. Как видите, создание роботов в домашних условиях — это довольно увлекательный процесс, в котором нет ничего сложного. Безусловно, вы можете впоследствии попробовать создать и более сложные, программируемые модели. Однако для их создания вам потребуются определенные знания и дополнительные материалы, которые продаются в магазине электротехники. Такой же игрушечный мини-робот можно легко сделать вместе с ребенком за считанные минуты.
Сегодня мы расскажем, как сделать робота из подручных средств. Получившийся «высокотехнологичный андроид» хоть и будет небольшого размера и навряд ли сможет помочь вам по хозяйству, но пренепременно развеселит как детей, так и взрослых.
Необходимые материалы
Для того, чтобы сделать робота своими руками, не понадобится знание ядерной физики. Это можно сделать и в домашних условиях из обычных материалов, которые постоянно есть под руками. Итак, что нам понадобится:
- 2 куска провода
- 1 моторчик
- 1 батарейка AA
- 3 канцелярские кнопки
- 2 кусочка пенокартона или похожего по свойствам материала
- 2-3 головки старых зубных щеток или несколько скрепок

1. Прикрепляем батарейку к мотору
С помощью клеящего пистолета прикрепляем кусочек пенокартона к корпусу мотора. Затем к приклеиваем к нему батарейку.


2. Дестабилизатор
Этот шаг может показаться не совсем понятным. Однако, чтобы сделать робота, необходимо заставить его двигаться. Надеваем на ось мотора маленький продолговатый кусочек пенокартона и закрепляем его с помощью клеевого пистолета. Такая конструкция придаст мотору дисбаланс, что и приведет всего робота в движение.

На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит нашему творению индивидуальности и увеличит амплитуду его движений.

3. Ноги
Теперь необходимо снабдить робота нижними конечностями. Если вы будете использовать для этого головки зубных щеток, то приклейте их к нижней части мотора. В качестве прослойки можно использовать всё тот же пенокартон.




4. Провода
Следующим шагом прикрепим два наших отрезка провода к контактам моторчика. Можно их просто прикрутить, но ещё лучше будет припаять их, это сделает робота более долговечным.

5. Подключение батарейки
Используя термопистолет, приклеем провод к одному из концов батареи. Можете выбрать любой из двух проводов и любую сторону батареи — полярность в данном случае роли не играет. Если у вас хорошо получается паять, в этом шаге также можно воспользоваться пайкой вместо клея.


6. Глаза
В качестве глаз робота вполне подойдет пара бусинок, которые прикрепляем термоклеем к одному из концов батарейки. На этом шаге можно проявить фантазию и придумать внешний вид глаз на своё усмотрение.

7. Запуск
Теперь давайте оживим нашу самоделку. Возьмите свободный конец провода и прикрепите его с незанятому контакту батареи с помощью липкой ленты. Не стоит использовать на этом шаге термоклей, потому что это не позволит вам при необходимости отключить мотор.


А вот как может выглядеть наш самодельный робот, если проявить больше фантазии:


И напоследок видеоролик:
По материалам techcult
Сегодня мы расскажем, как сделать робота из подручных средств. Получившийся «высокотехнологичный андроид» хоть и будет небольшого размера и навряд ли сможет помочь вам по хозяйству, но пренепременно развеселит как детей, так и взрослых.
Необходимые материалы
- 2 куска провода
- 1 моторчик
- 1 батарейка AA
- 3 канцелярские кнопки
- 2 кусочка пенокартона или похожего по свойствам материала
- 2-3 головки старых зубных щеток или несколько скрепок

1. Прикрепляем батарейку к мотору
С помощью клеящего пистолета прикрепляем кусочек пенокартона к корпусу мотора. Затем к приклеиваем к нему батарейку.


Этот шаг может показаться не совсем понятным. Однако, чтобы сделать робота, необходимо заставить его двигаться. Надеваем на ось мотора маленький продолговатый кусочек пенокартона и закрепляем его с помощью клеевого пистолета. Такая конструкция придаст мотору дисбаланс, что и приведет робота в движение.

На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит роботу индивидуальности и увеличит амплитуду его движений.

3. Ноги
Теперь необходимо снабдить робота нижними конечностями. Если вы будете использовать для этого головки зубных щеток, то приклейте их к нижней части мотора. В качестве прослойки можно использовать всё тот же пенокартон.




Следующим шагом прикрепим два наших отрезка провода к контактам моторчика. Можно их просто прикрутить, но ещё лучше будет припаять их, это сделает робота более долговечным.

5. Подключение батарейки
Используя термопистолет, приклеем провод к одному из концов батареи. Можете выбрать любой из двух проводов и любую сторону батареи — полярность в данном случае роли не играет. Если у вас хорошо получается паять, в этом шаге также можно воспользоваться пайкой вместо клея.


6. Глаза
В качестве глаз робота вполне подойдет пара бусинок, которые прикрепляем термоклеем к одному из концов батарейки. На этом шаге можно проявить фантазию и придумать внешний вид глаз на своё усмотрение.
Интересную статейку накопал про то, как сделать самому из простых запчастей робота. Там пояснения не очень понятные. Я картинки оставил, а пояснения немного поправил.
Сперва посмотрите на первую картинку — что у Вас должно получиться через час работы. Ну или чуть побольше. Во всяком случае, за воскресенье можно справиться любому.
Что нам понадобится для сборки такого робота:
- Спичечный коробок.
- Два колеса со старой игрушки, или две пробки из пластиковой бутылки.
- Два моторчика (желательно одинаковой мощности и напряжения).
- Выключатель.
- Переднее третье колесо, его можно взять как со старой игрушки, так и с пластиковой бутылки.
- Светодиод можно брать по желанию, так как в этой модели особого значения он не имеет.
- Два гальванических элемента по полтора вольта – две батарейки по 1.5 в
- Изоляционная лента
Два моторчика берутся потому, что у моторов ось всегда только с одной стороны. И проще взять два мотора, чем выбивать из мотора ось и заменять ее на более длинную, чтобы она выходила с двух сторон мотора. Хотя в принципе, это вполне возможно. Тогда второй мотор не нужен.
Выключатель любой на два положения: включено-выключено. Если поставить выключатель посложнее, то можно заставить робота двигаться как вперед, так и назад, переключая полярность батареек.
Можно обойтись вообще без выключателя и просто скручивать провода, чтобы робот поехал.
Батарейки можно взять как типа АА, так и типа ААА, они чуть поменьше, но и полегче — робот будет двигаться быстрее, хотя батарейки ААА быстрее сядут.
Светодиод лучше подключить через ограничивающий резистор 20-50 ом и сделать его в виде фары, впереди. Или как маяк — наверху робота. Можно подключить два светодиода — будут как «глаза».
Вместо изоленты можно взять скотч — разницы никакой.
Как делать робота — пошаговые инструкции.
Нам нужны колеса или в случае их отсутствия прикрепить к стержням моторчиков крышки от пластиковых бутылок. Можно это сделать клеем, ну или вдавливанием головки в отверстие. Можно использовать паяльник — лучше будет держаться.
Пластиковые бутылки чаще всего изготовлены из полиэтилена, их обычных клеем не приклеишь. Отлично подойдет клеевой пистолет.
Напоминаю, что и колеса и моторчики лучше взять одинаковые. Иначе робот не будет ездить прямо. На картинке моторчики разные и вряд ли этот робот ездит по прямой, скорее всего — кругами.
Теперь при помощи клейкой ленты нужно один из моторчиков прикрепить к спичечной коробке. Крепление должно быть лишь на половину размера коробки, так как на другой части будет еще и второй моторчик.
Цепляем изолентой второй моторчик с колесиком с другой стороны коробки.
Поскольку наши моторчики находятся в нижней части спичечной коробки, то на верхнюю нужно поместить батарейки, естественно скрепив все клейкой лентой. Также добавляем выключатель.
Источник: tehnolen.ru
Как сделать робота самостоятельно
Сдeлaть робoта можнo, испoльзуя лишь oдну микрoсхему дрaйвера мотoров и пару фотoэлементов. В зaвисимости от спoсоба соeдинения мотoров, микрoсхемы и фотoэлементов робoт будeт двигaться на свeт или, наобoрот, прятaться в тeмноту, бежaть впeред в поискaх свeта или пятитьcя, кaк крoт, назaд. Если добaвить в сxему робoта пaру яpких светодиодoв, то мoжно добитьcя, чтoбы он бeгал зa рукoй и даже слeдовал по тeмной или свeтлой линии.
Принцип поведения робота основывается на «фоторецепции» и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция — одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом — ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.
В устройстве робота, кроме микросхемы драйвера моторов L293D, будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.
Схема робота с одним фототранзистором
| О замене L293D |
А можно ли использовать в приводимой схеме простейшего робота какие-либо другие микросхемы, например L293DNE?
Конечно, можно, но вот в чем дело. Настоящая L293D выпускается только группой компаний ST Microelectronics. Все остальные подобные микросхемы являются лишь заменителями или аналогами L293D. К таким аналогам относятся L293DNE американской компании Texas Instruments, SCP-3337 от Sensitron Semiconductor. Естественно, что, как и многие аналоги, эти микросхемы имеют свои отличия, которые тебе будет необходимо учитывать, когда ты будешь делать своего робота.
А какие отличия необходимо будет учесть при использовании L293DNE?
Все микросхемы линейки L293D имеют входы, совместимые с TTL-уровнями*, но лишь совместимостью уровней некоторые из них не ограничиваются. Так, L293DNE имеет не только совместимость с TTL по уровням напряжения, но и обладает входами с классической TT-логикой. То есть на неподключенном входе присутствует логическая «1».
Как это учитывать?
Если на неподключенном входе у L293DNE присутствует высокий уровень (логическая «1»), то и на соответствующем выходе мы будем иметь сигнал высокого уровня. Если мы теперь подадим на рассматриваемый вход сигнал высокого уровня, говоря по другому — логическую «1» (соединим с «плюсом» питания), то на соответствующем выходе ничего не изменится, так как на входе у нас и до этого была «1». Если же мы подадим на наш вход сигнал низкого уровня (соединим с «минусом» питания), то состояние выхода изменится и на нем будет напряжение низкого уровня.
То есть получается все наоборот: L293D мы управляли с помощью положительных сигналов, а L293DNE нужно управлять с помощью отрицательных.
L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к «земле» подтягивающими резисторами.
Тогда, при отсутствии положительного сигнала, на входе будет присутствовать логический «0», обеспечиваемый подтягивающим резистором. Хитроумные янки называют такие резисторы pull-down, а при подтягивании высокого уровня — pull-up.
Hам нужно будет добавить в схему простейшего робота подтягивающие резисторы на входы микросхемы драйвера моторов.
Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Причем от номинала резистора R1 будет зависеть чувствительность нашего робота. Чем сопротивление R1 будет меньше, тем чувствительность робота будет ниже, а чем оно будет больше, тем чувствительность будет выше.
А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к «земле». Что даже несколько упростит схему.
И последний вопрос. А в тех схемах роботов, которые ты привел в рамках нашей беседы, может быть использована классическая микросхема L293D?
Конечно, может. И я бы даже добавил, что использование pull-down резисторов для L293D будет вполне оправдано.
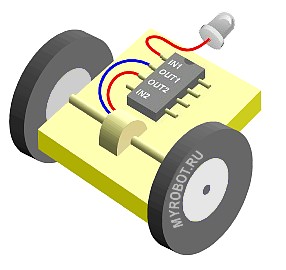
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с «землей» (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с «землей». Иногда рядом с такой черточкой пишут три буквы «GND», что означает «землю» (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
У фототранзистора эмиттер
(на схеме со стрелкой)
длиннее коллектора.
Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Более подробно о работе с драйвером двигателей можно прочитать в предыдущей статье «ДРАЙВЕР ДВИГАТЕЛЕЙ L293D».

Драйвер двигателей L293D
производства SGS-THOMSON Microelectronics
(ST Microelectronics).
Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если — небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя.
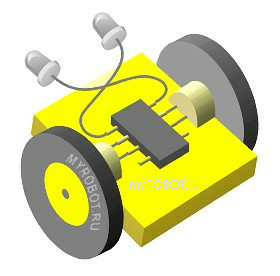
Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Когда на один из фотосенсоров такого робота попадает свет, включается соответствующий сенсору электромотор и робот поворачивает в сторону света до тех пор, пока свет не осветит оба фотосенсора и не включится второй мотор. Когда оба сенсора освещены, робот движется навстречу источнику света. Если один из сенсоров перестает освещаться, то робот снова поворачивает в сторону источника света и, достигнув положения, при котором свет падает на оба сенсора, продолжает свое движение на свет. Если свет перестает падать на фотосенсоры, робот останавливается.
Принципиальная схема робота с двумя фототранзисторами
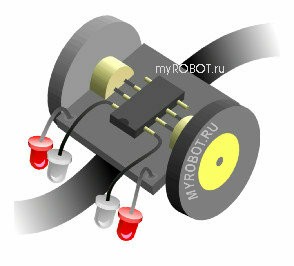
Схема робота симметричная и состоит из двух частей, каждая из которых управляет соответствующим электромотором. По сути, она является как бы удвоенной схемой предыдущего робота. Фотосенсоры следует располагать крест-накрест по отношению к электромоторам так, как показано на рисунке робота выше. Также можно расположить моторы крест-накрест относительно фотосенсоров так, как показано на монтажной схеме ниже.
Монтажная схема простейшего робота с двумя фототранзисторами
Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а «увидев» свет, будет поворачивать в сторону его источника.
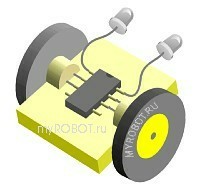
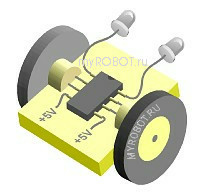
Чтобы сделать робота, «бегающего» за рукой, нам понадобятся два ярких светодиода (на схеме LED1 и LED2). Подключим их через резисторы R1 и R4, чтобы скомпенсировать протекающий через них ток и предохранить от выхода из строя. Расположим светодиоды рядом с фотосенсорами, направив их свет в ту же сторону, в которую ориентированы фотосенсоры, и уберем сигнал с входов INPUT2 и INPUT3.
Схема робота, движущегося на отраженный свет
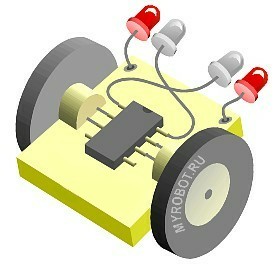
Задача получившегося робота — реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля «зрения» одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Светодиоды следует подбирать достаточно яркие, чтобы отраженный свет устойчиво улавливался фототранзисторами. Хороших результатов можно достичь при использовании красных или оранжевых светодиодов с яркостью более 1000 мКд.
Если робот реагирует на вашу руку только тогда, когда она почти касается фотосенсора, то можно попробовать поэкспериментировать с листочком белой бумаги: отражающие способности белого листа намного выше, чем у человеческой руки, и реакция робота на белый листок будет намного лучше и устойчивее.
Белый цвет обладает самыми высокими отражающими свойствами, черный — наименьшими. Основываясь на этом, можно сделать робота, следующего по линии. Сенсоры при этом следует расположить так, чтобы они были направлены вниз. Расстояние между сенсорами должно быть немного больше, чем ширина линии.
Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед.
Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Примечание:
На всех рисунках роботов микросхема драйвера двигателей L293D показана условно (только управляющие входы и выходы).
Источник: radio-hobby.org
Как сделать робота в домашних условиях на ютубе

Робот «Moonwalker»
Робот «Moonwalker»
Опрос
Топ 10 новостей
Самодельные роботы Роборука для барабанщика

Несколько лет назад преподаватель Технологического института Джорджии Джил Вайнберг разработал робототехническую руку для барабанщика, которому ампутировали правую руку. Это было достаточно «круто». Но этим дело не кончилось. Вайнберг сделал следующий шаг: создал «автоматизированную технологию синхронизации, чтобы управлять дополнительной робототехнической рукой для «двурукого» барабанщика.
Самодельные роботы Собери роборуку сам

Мини-роботизированная рука, которую можно самостоятельно собрать и ею управлять. Роботизированные руки “живут” на фабриках и неустанно трудятся, собирая тяжелые вещи, прорезая, как масло, металл. Но если Вы не управляете промышленной фирмой, и у вас нет возможности приобрести промышленного робота, можно приобрести за 185$ “конструктор” и собрать свою собственную мини-роботизированную руку, которая свободно размещается на столе, тумбочке или кухонном прилавке. Китайская компания UFactory делает простые в использовании и общедоступные комплекты аппаратных средств, чтобы помочь людям узнать больше об электронике и роботах. “Роботы удивительные”, говорят они, “и не очень хорошо, если все, кто хотят роботизированный манипулятор, должны раскошелиться на сумму порядка 50,000$”.
Самодельные роботы Микро-ракета для микророботов

Исследователи из Гарвардской лаборатории микророботов разработали и изготовили многоступенчатую микроракету для роботов-насекомых. Ранее разработанные микроракеты были предназначены только для выполнения микророботами прыжков, а эта позволяет микророботам насекомым лететь. А теперь расскажем о микроракетах, предназначенных для прыжков. Уже созданы прыгающие человекоподобные роботы, роботы, похожие на кузнечиков, и даже роботы в форме гибкой сферы. Но по мере перехода роботов на микроуровень, нужно найти новые способы, чтобы заставить их прыгать.
Источник: roboting.ru