ШИМ (широтно-импульсная модуляция, англ. pulse—widthmodulation (PWM)) — это способ управления мощностью путём импульсной подачи питания. Мощность меняется в зависимости от длительности подаваемых импульсов.
ШИМ в современной электронике применяется повсеместно, для регулировки яркости подсветки вашего смартфона, скорости вращения кулера в компьютере, для управления моторами квадрокоптера или гироскутера. Cписок можно продолжать бесконечно.
В любительской электронике ШИМ контроллеры часто используются для управления яркостью светодиодных лент и для управления мощными двигателями постоянного тока.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю.
В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Что такое ШИМ? Как ШИМ регулирует яркость, температуру, обороты двигателя и напряжение? Разбираемся!
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
Объясняем ШИМ | Почему OLED мерцает?
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
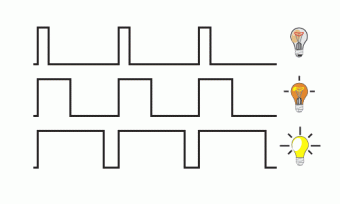
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).

Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей “затвор – исток” и “затвор – сток”. Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.

Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта – обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует – отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального – проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах – некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков – обрыв петли ООС или цепочки RC, деградация емкости фильтра.
ШИМ-контроллеры в составе блоков питания
Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.

Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ. Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Важные страницы
- Каталог ссылок на дешёвые Ардуины, датчики, модули и прочие железки с Aliexpress у проверенных продавцов
- Подборка библиотек для Arduino, самых интересных и полезных, официальных и не очень
- Полная документация по языку Ардуино, все встроенные функции и макро, все доступные типы данных
- Сборник полезных алгоритмов для написания скетчей: структура кода, таймеры, фильтры, парсинг данных
- Видео уроки по программированию Arduino с канала “Заметки Ардуинщика” – одни из самых подробных в рунете
5 / 5 ( 2 голоса )
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
- Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT — с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
Широтно-импульсное регулирование ШИР
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ. Однако у нас различие между ними все же существует.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует.

В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.
Упрощенно, компаратор имеет три вывода: два входа и один выход. Компаратор работает следующим образом. Если величина напряжения на входном выводе «+» (неинвертирующий вход) выше, чем на входе «-» (инвертирующий вход), то на выходе компаратора будет сигнал высокого уровня. В противном случае – низкого уровня.
В нашем случае, именно сигнал высокого уровня открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся следующим графиком.

При ШИР на одни вход компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют опорным. На второй вход подается задающее напряжение, которое сравнивается с опорным. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс. Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза.

Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения, а соответственно и среднее напряжение на нагрузке.
Частоту опорного сигнала стремятся сделать максимальной, чтобы снизить параметры дросселей и конденсаторов (на схеме не показаны). Последнее приводит к снижению массы и габаритов импульсного блока питания.
Обзор типичных схем
Регулировать вращения вала электродвигателя малой мощности можно посредством последовательного соединения резистора питания с отсутствие. Однако у такого варианта имеется очень низкий КПД и отсутствие возможности плавного изменения скорости. Чтобы избежать такой неприятности, следует рассмотреть несколько схем регулятора, которые применяются чаще всего.
Как известно, ШИМ имеет постоянную амплитуду импульсов. Кроме того, амплитуда идентична напряжению питания. Следовательно, электродвигатель не остановится, даже работая на малых оборотах.
Второй вариант аналогичен первому. Единственное отличие, что в качестве задающего генератора используется операционный усилитель. Этот компонент имеет частоту 500 Гц и занимается выработкой импульсов, имеющих треугольную форму. Регулировка также осуществляется переменным резистором.
Схема

Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора. Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке
. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Принцип шим-регулятора
Работа ШИМ регулятора сложностью не отличается. ШИМ-регулятор — устройство, выполняющее такую же функцию, что и традиционный линейный регулятор мощности (то есть, меняет напряжение или ток за счёт силового транзистора, рассеивающего значительную мощность на себе). Но ШИМ-регулятор отличается намного большим КПД. Достигается это благодаря тому, что управляющий силовой транзистор функционирует в ключевом режиме (либо включен, тогда пропускает большой ток, но мало падение напряжения, либо выключен — ток не проходит). В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
После силового транзистора напряжение выходит как прямоугольные импульсы с изменяющейся скважностью в зависимости от необходимой мощности. Но сигнал нужно демодулировать (то есть, выделить среднее напряжение). Этот процесс происходит или в самой нагрузке (когда она индуктивного характера) или если между нагрузкой и силовым каскадом располагают фильтр нижних частот.
Пример использования шим регулятора
Самый простой пример использования регулятора напряжения ШИМ — ШИМ микросхема NE555, с которой знаком каждый радио-любитель. Благодаря ее универсальности можно конструировать самые разнообразные детали: от простейшего одновибратора импульсов с 2 в обвязке до модулятора, состоящего из большого числа компонентов. ШИМ регулятор напряжения имеет широкую область применения — это схемы регулировки яркости светодиодов и лент, а также регулировка скорости вращения движков.
Если нужно управлять плюсовым контактом
В таком случае нам понадобится другой мосфет- транзистор — P-канальный. Схема аналогична, только подтягивающий резистор подключен к плюсу.
Также нужно будет инвертировать сигнал на выходе ардуино, ведь при подаче 5 вольт транзистор будет закрываться, а при 0 — открываться, значит шим скважностью в 30% выдаст 70% мощность на выходе схемы.

Стоит оговориться такая схема будет работать только при питании не выше 5 вольт, так как для полного закрытия P-канального транзистора необходимо подтянуть его затвор к плюсу питания, а ардуина способна выдавать на цифровой пин только 5 вольт. Значит, при питании хотя бы чуть-чуть выше напряжения выдаваемого на цифровой пин транзистор будет не полностью закрываться при верхней части импульса ШИМ и БУДЕТ СИЛЬНО ГРЕТЬСЯ. Полностью отключить нагрузку он тоже не сможет.
Если нужно управлять, к примеру,12 -ти вольтовым устройством, то схема немного усложнится. Добавится так называемое «плечо раскачки» или драйвер полевого транзистора. По классике он собирается на двух, а иногда и на трёх транзисторах, но мы есть вариант немного проще, который работает при невысоких частотах:
Источник: sharonness.com
Что такое ШИМ и как она используется в Arduino
Давайте разберёмся, что скрывается за аббревиатурой ШИМ, как это работает, для чего нужно и как мы можем использовать её в работе с Arduino.
Статьи по теме:
- Что такое ШИМ и как она используется в Arduino
- Как записать и прочитать флеш-память с помощью Arduino
- Интерфейс I2C и Arduino
Вам понадобится
- — Arduino;
- — светодиод;
- — резистор сопротивлением 200 Ом;
- — компьютер.
Инструкция
Цифровые выводы Arduino могут выдавать только два значения: логический 0 (LOW, низкий уровень) и логическую 1 (HIGH, высокий). На то они и цифровые. Но есть у Ардуино «особые» выводы, которые обозначаются PWM. Их иногда обозначают волнистой чертой «~» или обводят кружочками или ещё как-то выделяют среди прочих. PWM расшифровывается как «Pulse-width modulation» или широтно-импульсная модуляция, ШИМ.
Широтно-импульсно модулированный сигнал — это импульсный сигнал постоянной частоты, но переменной скважности (соотношение длительности импульса и периода его следования). Из-за того, что большинство физических процессов в природе имеют некоторую инерцию, то резкие перепады напряжения от 1 к 0 будут сглаживаться, принимая некоторое среднее значение. С помощью задания скважности можно менять среднее напряжение на выходе ШИМ.
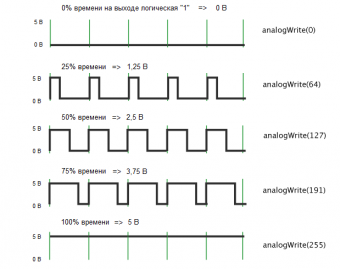
Если скважность равняется 100%, то всё время на цифровом выходе Arduino будет напряжение логическая «1» или 5 вольт. Если задать скважность 50%, то половину времени на выходе будет логическая «1», а половину — логический «0», и среднее напряжение будет равняться 2,5 вольтам. Ну и так далее.
В программе скважность задаётся не в процентах, а числом от 0 до 255. Например, команда «analogWrite(10, 64)» скажет микроконтроллеру подать на цифровой PWM выход №10 сигнал со скважностью 25%.
Выводы Arduino с функцией широтно-импульсной модуляции работают на частоте около 500 Гц. Значит, период следования импульсов — около 2 миллисекунд, что и отмеряют зелёные вертикальные штрихи на рисунке.
Получается, что мы можем сымитировать аналоговый сигнал на цифровом выходе! Интересно, правда?!
Как же мы это можем использовать? Применений масса! Например, это управление яркостью светодиода, управление скоростью вращения двигателя, управление током транзистора, извлечение звука из пьезоизлучателя.
Давайте рассмотрим самый базовый пример — управление яркостью светодиода с помощью ШИМ. Соберём классическую схему.
Источник: www.kakprosto.ru
Широтно-импульсный регулятор оборотов электродвигателя 12 вольт – ШИМ контроллер своими руками


Без выяснения значения этого термина продолжать не имеет смысла. Итак, широтно-импульсная модуляция — это процесс управления мощностью, которая подводится к нагрузке, осуществляемая путём видоизменения скважности импульсов, которая делается при постоянной частоте. Существует несколько типов широтно-импульсной модуляции:
1. Аналоговый.
3. Двоичный (двухуровневый).
4. Троичный (трехуровневый).
![]()
![]()




![]()
Что такое ШИМ-регулятор?

Теперь, когда мы знаем, что такое широтно-импульсная модуляция, можно поговорить и о главной теме статьи. Используется ШИМ-регулятор для того, чтобы регулировать напряжение питания и для недопущения мощных инерционных нагрузок в авто- и мототехнике. Это может звучать слишком сложно и лучше всего пояснить на примере.
Допустим, необходимо сделать, чтобы лампы освещения салона меняли свою яркость не сразу, а постепенно. Это же относится к габаритным огням, автомобильным фарам или вентиляторам. Воплотить такое желание можно путём установки транзисторного регулятора напряжения (параметрический или компенсационный). Но при большом токе на нём будет выделяться чрезвычайно большая мощность и потребуется установка дополнительных больших радиаторов или дополнение в виде системы принудительного охлаждения с использованием маленького вентилятора, снятого с компьютерного устройства. Как видите, данный путь влечёт за собой много последствий, которые необходимо будет преодолеть.
Настоящим спасением из данной ситуации стал ШИМ-регулятор, который работает на мощных полевых силовых транзисторах. Они могут коммутировать большие токи (которые достигают 160 Ампер) при напряжении всего в 12-15В на затворе. Следует отметить, что сопротивление у открытого транзистора довольное мало, и благодаря этому можно заметно снизить уровень рассеиваемой мощности.
Чтобы создать свой собственный ШИМ-регулятор, понадобится схема управления, которая сможет обеспечить разность напряжения между истоком и затвором в границах 12-15В. Если этого не получится достичь, то сопротивление канала будет сильно увеличиваться и значительно возрастёт рассеиваемая мощность. А это, в свою очередь, может привести к тому, что транзистор перегреется и выйдет из строя.
Выпускается целый ряд микросхем для ШИМ-регуляторов, которые смогут выдержать повышение входного напряжения до уровня 25-30В, при том, что питание будет всего 7-14В. Это позволит включать выходной транзистор в схеме вместе с общим стоком. Это, в свою очередь, необходимо для подключения нагрузки с общим минусом. В качестве примеров можно привести такие образцы: L9610, L9611, U6080B … U6084B.
Большинство нагрузок не потребляет ток больше 10 ампер, поэтому они не могут вызвать просадку напряжения. И как результат – использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение. И именно такие образцы ШИМ-регуляторов и будут рассмотрены в статье.
Они могут быть построены на основе несимметрического или ждущего мультивибратора. Стоит поговорить про ШИМ-регулятор оборотов двигателя. Об этом далее.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю.
В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Схема №1

Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора.
Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Мощный ШИМ регулятор на NE555 своими руками

Всех приветствую, сегодня мы сделаем довольно популярную и мощную схему ШИМ регулятора мощности на микросхеме NE555. У меня на ютуб канале на эту тему вышел видеоролик и я буду вам очень благодарен если вы посмотрите и оцените его.
Для начала давайте рассмотрим несколько способов регулировки мощности. Самый первый и самый надёжный регулятор это линейный способ регулировки.

Отличным примером может послужить обычный переменный резистор, чем больше сопротивление резистора тем меньше ток будет на выходе. Но у него есть большой минус, а именно линейный режим работы. Всё лишнее напряжение перерабатывается в тепло. Допустим на нашем БП будет напряжение 30В, а на выходе у нас будет 12В и в качестве нагрузки будет лампочка, которая будет потреблять ток 3А. По не трудной формуле можно высчитать сколько ватт тепла будет выделяться на резисторе.

P=(30-12)*3=53Вт тепла будет выделяться на резисторе. Сперва кажется, что эта цифра не очень большая, но на самом деле это огромная цифра и обычный переменный резистор сгорит за считанные секунды. Поэтому нам потребуется мощный резистор который сможет переварить такую мощность плюс должен быть еще запас по мощности. Данный способ годится только тогда когда между входом и выходом небольшая разница по напряжению.

Следующий способ это DC-DC способ регулировки. КПД таких регуляторов уже намного выше и может быть даже выше 90%. Вникать в принцип работы схемы мы не будем, но скажу одно, если вам потребуется регулировать мощность мощных ламп и моторчиков, то этот способ тоже не очень сильно подойдёт так, как все ровно будут потери на дросселе, диоде и даже на конденсаторе.

Также есть третий вид регулировки мощности, а именно ШИМ регулировка. КПД таких схем уже очень большой, связанно это с тем что всю нагрузку через себя пропускает только полевой транзистор у которого очень маленькое сопротивление, причём это всё работает в импульсом режиме.
Внимание:
первый и второй способ подойдёт для регулируемого БП, третий способ категорически не подходит.

ШИМ регулятор преобразует постоянный сигнал в набор периодичных импульсов определённой частоты в нашем случае схема работает на частоте 27Килогерц но все ровно при регулировке скважности частота будет немного меняться в ту или иную сторону но на работоспособность схемы ну и на саму нагрузку это влиять не должно. ШИМ регулятор преобразует постоянный сигнал в набор периодичных импульсов определённой частоты в нашем случае схема работает на частоте 27кГц, но все ровно при регулировке скважности частота будет немного меняться в ту или иную сторону, но на работоспособность схемы ну и на саму нагрузку это влиять не должно.

Если заполнение шима будет 50% то лампочка будет светиться в половину своей мощности, а моторчик будет крутиться в 2 раза медленнее.

Сердцем схемы является микросхема NE555, она довольно дешёвая и найти её совсем несложно. Конденсатором на 1nf мы задаём рабочую частоту схемы, чем меньше номинал конденсатора тем выше будет частота и наоборот чем больше номинал конденсатора, тем ниже будет наша частота.

На схеме также присутствует стабилизатор напряжения 7812 — он запитывает микросхему стабильным напряжением. Я использовал советский аналог КРЕН8Б она тоже стабилизирует напряжение в районе 12В.

А если у вас нету стабилизатора на 12В то в принципе подойдёт любой другой стабилизатор напряжения, который стабилизирует напряжение от 6 до 18В.

Всю нагрузку через себя пропускает мощный полевой транзистор irf2805, в принципе подойдут любые полевики. Но будьте в курсе что если вы купили радиодетали на Aliexspress то знайте что характеристики будут отличаться от заявленных параметров.

Для начала мы собираем узел запитки самой микросхемы. Деталей не много всего навсего 2 конденсатора и 1 кренка. Подключаем блок питания на котором должно быть выставлено от 13 до 28В, проверяем есть ли напряжение на выходе. В моем случае должно быть примерно 12В если всё будет хорошо то дальше собираем часть генератора частоты.

После того как собрали эту часть берём и снова проверяем схему. Если у вас есть осциллограф, то проблем никаких не будет, а если осциллографа нету, то можно использовать другой метод. Для проверки, нам потребуется динамик, которого мы подключаем к минусу и к 3 ноге микросхемы.
Также потребуется увеличить номинал конденсатора на 1nf параллельно к нему можно подключить ещё один но уже на 10nf. Когда вы включите схему вы должны услышать писк, а когда начнёте крутить переменным резистором то частота поиска должна изменяться. После проверки вы смело можете припаять силовую часть схемы и можете быть уверены, что регулятор запуститься.

При больших нагрузках полевик будет немного нагреваться поэтому желательно прикрутить небольшой радиатор. Но если нагрузка будет небольшая, то можно и не прикручивать его.

С коллекторными моторами тоже идёт всё на ура. Но заметьте что если вы будете регулировать мощность мощных моторов то дополнительно на выход желательно припаять защитный диод который будет на себе сжигать всё пульсации которые выходят из моторчика.

Также хочу сказать что напряжение после ШИМ регулятора не меняется, оно постоянное если на входе будет 15В то и на выходе будет 15В только оно будет пульсировать. Измерительные приборы принимают это как регулировку напряжения, но на самом деле это не так, а доказать это я смогу вам показав фото выше.
Данная схема мне очень понравилась и советую вам тоже её сделать. Запускается с первого раза и не требует никаких наладок. А на этом всё, надеюсь вам понравилась моя статья, также напомню что вначале есть ссылка на мой видеоролик не забудьте посмотреть это важно, всем пока.
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
Схема №2

Обладает лучшими характеристиками, нежели первый образец, но сложнее в выполнении. Может регулировать эффективное напряжение на нагрузке в диапазоне 0-12В, до которого изменяется с начального значения 8-12В. Максимальный ток зависит от типа полевого транзистора и может достигать значительных значений. Учитывая, что выходное напряжение является пропорциональным входному управляющему, данную схему можно использовать как часть системы регулирования (для поддержки уровня температуры).
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.

Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).

Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.

Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Причины распространения
Чем привлекает автолюбителей ШИМ-регулятор? Следует отметить стремление к увеличению КПД, когда проводится построение вторичных источников питания для электронной аппаратуры. Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании. Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
Источник: molotok34.ru